Physicists Predict Mechanics of Touch
A physical model accounts for observed neural responses to touch and predicts additional properties of this sensory system.
A physical model accounts for observed neural responses to touch and predicts additional properties of this sensory system.
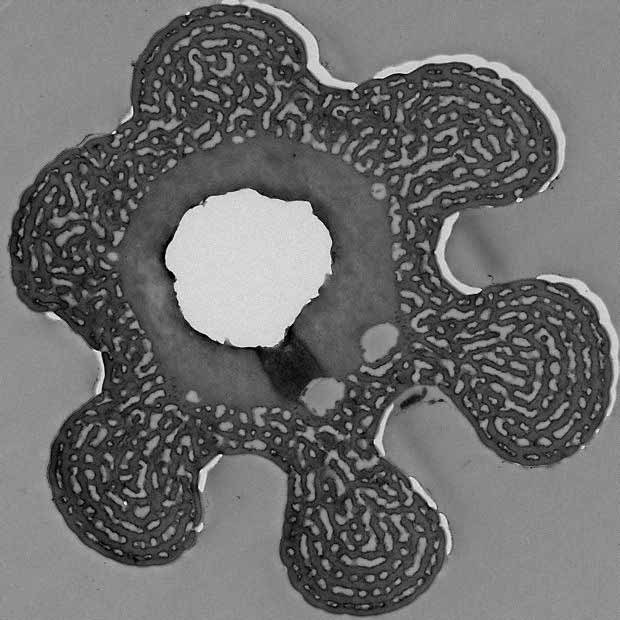
Scientists recently discovered that tiny, multilayer nanostructures inside a tarantula’s hair are responsible for its vibrant color. The science behind how these hair-raising spiders developed their blue hue may lead to new ways to improve computer or TV screens using biomimicry.
UC San Diego Launches CORE A set of best practices will guide Institutional Review Boards (IRBs) and researchers in the design and review of studies that use social media, self-tracking devices and other mobile technologies.to Foster Ethical Research Using Personal Health Data
George Hemingway, a seagoing biological oceanographer and academic administrator who spent more than 30 years at Scripps Institution of Oceanography at UC San Diego, passed away on Nov. 8, 2015.
The Association for the Sciences of Limnology and Oceanography (ASLO) has recognized three Scripps Institution of Oceanography at UC San Diego professors as 2015 Sustaining Fellows in honor of their sustained excellence in contribution to ASLO and the aquatic sciences.
Using a groundbreaking gene editing technique, biologists at UC San Diego, working in collaboration with biologists at UC Irvine, have created a strain of mosquitoes capable of rapidly introducing malaria-blocking genes into a mosquito population through its progeny, ultimately eliminating the insects’ ability to transmit the disease to humans.
Keep up with all the latest from UC San Diego. Subscribe to the newsletter today.