Exploring the Diverse Applications of Robotics Beyond the Lab at UC San Diego
Story by:
Published Date
Article Content
From the operating room to our homes and streets, robots are becoming increasingly integral to our daily activities. On Nov. 14, 2023 the UC San Diego Contextual Robotics Institute hosted its eighth annual forum, bringing together robotics experts from industry and academia to discuss cutting-edge developments in the field that aim to improve our health, safety, learning and quality of life.
The one-day event featured presentations from some of the region’s largest robotics companies, as well as faculty talks, posters and demonstrations of the cutting-edge robotics research happening at UC San Diego. The event unfolded with the theme “Robots in the Wild,” which highlighted the innovative strides being made in enabling robots to seamlessly navigate and interact in real-world scenarios.
“This year, we’ve chosen the theme of ‘Robots in the Wild,’ signaling our mission to build robots that thrive in open-ended, uncontrolled environments,” said Henrik Christensen, director of the UC San Diego Contextual Robotics Institute. “Our work goes beyond confined laboratories; we aim to deploy our robotics technologies into real-world systems, whether it’s underwater exploration, minimally invasive surgery, safe human collaboration, or autonomous driving on campus,” said Christensen, who is a professor in the Department of Computer Science and Engineering at the UC San Diego Jacobs School of Engineering.
Robots navigating through crowds
For example, a team of robotics researchers at UC San Diego is developing a safety algorithm that can enable robots to navigate around pedestrians in crowded environments safely and efficiently. This algorithm, a blend of control theory and machine learning techniques, encodes implicit information about how humans interact and behave in crowds.
As a result, this safety algorithm can be used to guide robots through crowds that are 100 times denser than the training data. It is also more generalizable than other machine learning approaches, making it an ideal solution for navigation in changing and unstructured environments. Applications include autonomous driving, disaster relief, and space robotics.
The research is led by Sylvia Herbert, a professor in the Department of Mechanical and Aerospace Engineering, and Sicun (Sean) Gao, a professor in the Department of Computer Science and Engineering, both at UC San Diego. The team recently presented this work at IROS 2023, where it won the RoboCup Best Paper Award.
Robot hands performing everyday manual tasks
Another faculty talk focused on advancing the capabilities of robotic hands. Xiaolong Wang, a professor in the Department of Electrical and Computer Engineering at UC San Diego, discussed his research on developing algorithms to train robotic hands to perform basic manual tasks. These include rotating objects, throwing and catching, placing a teapot on a stove, and opening a microwave door.
“These skills may be common for humans, but they are skills that robots still do not have,” said Wang. “We must first enable robots to master these low-level skills before we can train them to learn more complex tasks, like using tools or cutting with scissors.”
Wang also discussed his approach to train robots to generalize their skills across various scenarios. By running simulations on virtual robot hands, his research team can collect large volumes of data to build advanced computer models. These models can then be transferred to real-world experiments on actual robot hands. The robots can then apply learned actions to previously unencountered objects and settings, enabling them to be versatile in different environments.
Robots in the operating room
The impact of robotics extends beyond everyday tasks. Tania Morimoto, a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego, is developing soft, flexible snake-like robots for minimally invasive surgeries. These robots offer increased dexterity, precision and control for surgeons, especially when navigating through tight, highly curved areas inside the body. For example, they have the potential to make it easier to access occlusions in blood vessels of stroke patients. Additionally, these robots are more compliant, making them safer to use inside the body.
“In order to make truly impactful systems, we are focusing on designing new surgeon-side and patient-side robots with the goal of improving patient outcomes,” said Morimoto.
Morimoto’s research group is working with several collaborators from UC San Diego School of Medicine, including clinicians who specialize in colorectal surgeries; endovascular neurosurgical techniques to prevent strokes; surgical therapies to treat voice, airway and swallowing conditions; and treatment of cancer and non-cancer related pathologic skeletal fractures.
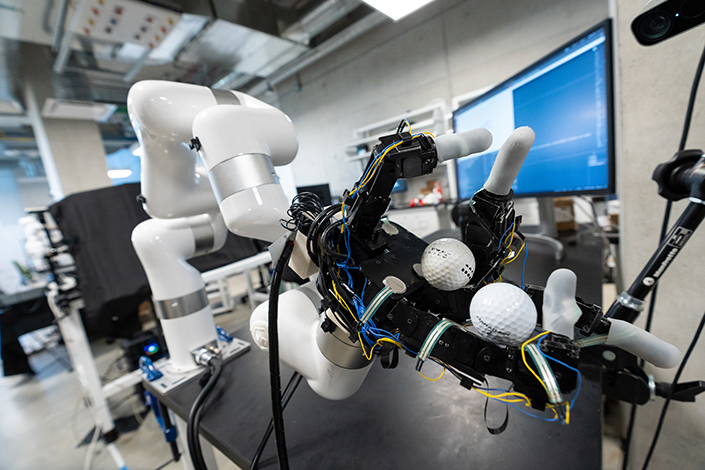
Robotic hand developed in the lab of Xiaolong Wang can rotate a variety of objects.
Such interdisciplinary collaboration is a hallmark of the Contextual Robotics Institute at UC San Diego.
“Here at UC San Diego, robotics is not confined to the field of engineering,” said Albert P. Pisano, dean of the Jacobs School of Engineering at UC San Diego. “We have a campus-wide dedication to advancing robotics for the public good. We bring together researchers from various disciplines across campus—from social sciences to health sciences, business and global policy—to collectively tackle the toughest challenges in robotics that cannot be solved by one entire field alone.”
Optimizing robot design
Collaboration was also evident in the work of John Hwang, a professor in the Department of Mechanical and Aerospace Engineering at UC San Diego, who develops what are called multidisciplinary design optimization algorithms. These are computational methods that can be used to predict an optimal design for a system, such as a robot’s shape or a vehicle’s structure, when given a number of design variables as input.
Partnering with Morimoto, Hwang is optimizing the design of snake-like robots, determining the optimal lengths, curvatures, radii and thicknesses of their components, as well as the optimal path inside a patient’s anatomy.
In his own lab, Hwang is applying multidisciplinary design optimization algorithms to develop optimal designs for electric air taxis. During his talk, Hwang underscored the potential for these algorithms to drastically reduce the time required for designing engineering systems.
“Our optimization algorithms leverage computational models to help engineers design better robots, and to do so more efficiently,” said Hwang.
Robots enabling remote social interaction from home
After the industry and faculty talks, UC San Diego students showcased their robotics projects during the forum’s tech exhibit.

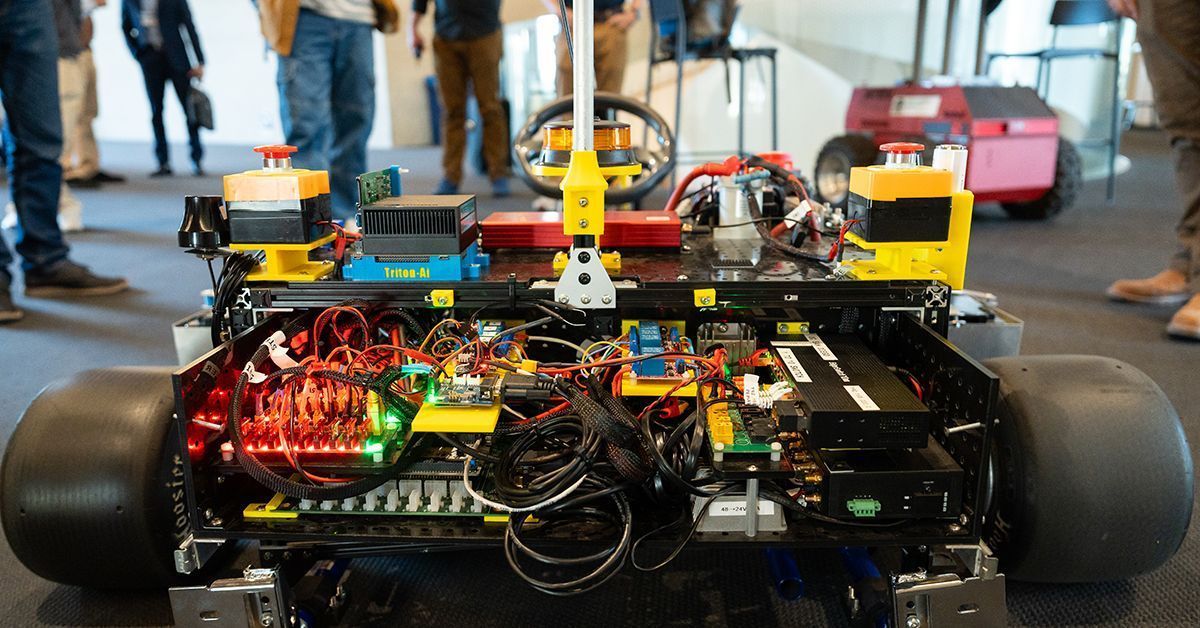
Forum participants check out a self-driving mail delivery cart developed in the lab of Henrik Christensen.
Pratyusha Ghosh, a computer science and engineering Ph.D. student in the lab of professor Laurel Riek, demonstrated her work on a telepresence robot designed to support individuals with long COVID-19 who may be unable to leave their homes and engage in daily routines due to the severity of their symptoms. The robot is mobile and equipped with a camera, display and microphone, as well as an arm and gripper to give users a sense of touch. The robot can be deployed in places such as schools, work offices or museums to enable users to remotely interact with others from the comfort of their own homes.
“I hope to develop telepresence robot systems that are accessible and support the remote inclusion of people with chronic illnesses in various social spaces,” said Ghosh. “These robots act as an extension of the user and facilitate social connectedness and user’s sense of presence in the remote environment. However, controlling these robots can be challenging and tiring, and may exacerbate the users’ symptoms. As such, I am actively working on the appropriate design of telepresence robot systems for people with chronic illnesses in ongoing and future projects.”
Other student projects on display included an at-home assistive robot that can provide personalized neurorehabilitation for people with mild cognitive impairment; a robotic arm adept at handling soft objects; and a self-driving cart that can deliver mail around campus.

A telepresence robot that can enable remote social interaction for individuals at home with chronic illnesses is being developed by computer science and engineering Ph.D. student Pratyusha Ghosh (left) and her teammates in the Healthcare Robotics Lab directed by Laurel Riek.
You May Also Like




How Climate Policies that Incentivize and Penalize Can Drive the Clean Energy Transition
Politics & SocietyStay in the Know
Keep up with all the latest from UC San Diego. Subscribe to the newsletter today.