From Self-Folding Robots to Computer Vision
UC San Diego makes strong showing at the International Conference on Intelligent Robots and Systems
Published Date
Article Content
From self-folding robots, to robotic endoscopes, to better methods for computer vision and object detection, researchers at the University of California San Diego have a wide range of papers and workshop presentations at the International Conference on Intelligent Robots and Systems (or IROS) which takes place from Sept. 24 to 28 in Vancouver, Canada. UC San Diego researchers also are organizing workshops on a range of themes during the event.
“IROS is one of the premier conferences in robotics,” said Henrik Christensen, director of the Contextual Robotics Institute and a professor of computer science at UC San Diego. “It is essential for our institute that we present key papers across manufacturing, materials, healthcare and autonomy. I am very pleased to see that we have a strong showing at this flagship conference.”
The conference this year focuses on “friendly people, friendly robots.” Robots and humans are becoming increasingly integrated in various application domains, conference organizers explain on the IROS 2017 website. “We work together in factories, hospitals and households, and share the road,” organizers said. “This collaborative partnership of humans and robots gives rise to new technological challenges and significant research opportunities in developing friendly robots that can work effectively with, for, and around people.”
Soft robotics is one way to create robots that are not dangerous for humans and the research group of roboticist Michael Tolley is exploring the field with three papers at IROS 2017. Better interactions between robots and people also require improving computer vision and researchers led by computer scientist Laurel Riek are proposing using depth information to do so in one paper. Computer scientist Gary Cottrell has a paper on improving object recognition processes. Meanwhile, electrical engineer Michael Yip is looking to make medical robots like the Da Vinci surgical system even better.
Tolley also is one of the organizers of the Sept. 28 workshop titled “Folding in Robotics.” Yip is one of the organizers of the Sept. 24 workshop titled “Continuum Robots in Medicine, Design, Integration, and Applications.” Mechanical engineer Nicholas Gravish is one of the organizers for the Sept. 28 “Robotics-inspired Biology” workshop.
Conference papers:
Custom Soft Robotic Gripper Sensor Skins for Haptic Object Visualization
Benjamin Shih, Dylan Drotman, Caleb Christianson, Zhaoyuan Huo, Ruffin White, Henrik Iskov Christensen and Michael Thomas Tolley, Univ. of California, San Diego
Towards Rapid Mechanical Customization of Cm-Scale Self-Folding Agents
William Weston-Dawkes, Aaron Ong, Majit Abdul, Ramzi Mohamad, Francis Joseph, and Michael Thomas Tolley,Univ. of California, San Diego
Differential Pressure Control of 3D Printed Soft Fluidic Actuators
Tom Kalisky, Yueqi Wang, Benjamin Shih, Dylan Drotman, Saurabh Jadhav, Spencer Aronoff, and Michael Thomas Tolley, Univ. of California, San Diego
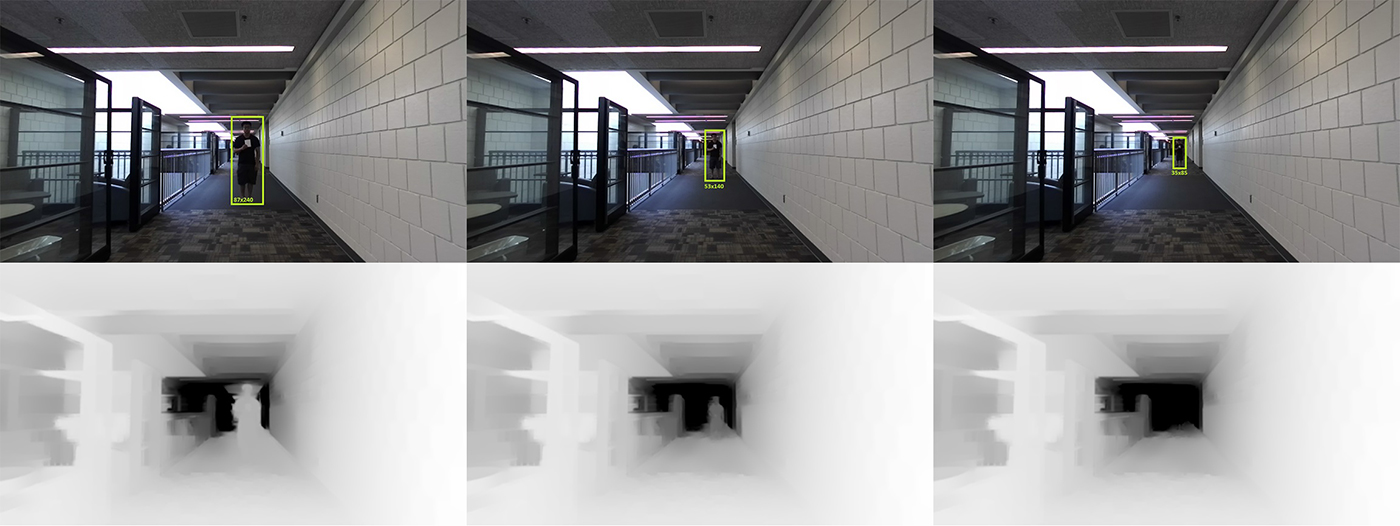
Faster Robot Perception Using Salient Depth Partitioning
Darren Chan, Angelique Taylor, and Laurel D. Riek, Univ. of California San Diego
Belief Tree Search for Active Object Recognition
Mohsen Malmir and Garrison W. Cottrell, Univ. of California, San Diego
retraining the supervised LSTM network, the AOR performance on the test set improves significantly.
Visual Feedback Control of Tensegrity Robotic Systems
Haresh Karnan, Raman Goyal and Manoranjan Majji, Texas A&M Univ, Robert E. Skelton, Univ. of California, San Diego and Puneet Singla, State Univ. of New York at Buffalo
Workshop papers:
Screw-Propelled Endoscopic Robot
Kevin Cheng, Andrew Saad, Dmitrii Votintcev, Elaine Tanaka, Michael Yip, Univ. of California, San Diego
Robot Control of Endoscopic Instruments using Flexible Polymer Sheath
Aaron Gunn, Mrinal Verghese, Wesly Wong, Michael Yip, Univ. of California, San Diego
Share This:




Stay in the Know
Keep up with all the latest from UC San Diego. Subscribe to the newsletter today.