Franklin Antonio Hall Sparks Research Collaborations
The fruits of these team efforts are presented at the ICRA 2024 conference

Published Date
Article Content
From improving tools for robot-assisted surgery to studying how humans prefer to interact with robots, collaborations across different departments at the Jacobs School of Engineering are in the spotlight in this year’s accepted papers for the 2024 IEEE International Conference on Robotics and Automation.
The interdisciplinary collaborations were partially ignited by the opening of Franklin Antonio Hall in 2022, which is home to various collaboratories bringing together research from across disciplines, including computer scientists, mechanical engineers and electrical engineers, into shared lab spaces.
ICRA brings together robotics researchers, students and industrial partners from around the world to discuss the latest innovations and breakthroughs, highlighting the role of robotics and automation in addressing global challenges.
Incidentally, the theme of this year’s ICRA conference is “CONNECT+”--reflecting the conference’s aim of helping to build relationships and potential collaborations with participants within and outside their field of study.
“This year’s papers accepted at ICRA from UC San Diego researchers show that the collaborative spaces housed in the new Franklin Antonio Hall are bearing fruit,” said Henrik Christensen, a professor in the Department of Computer Science and Engineering and Director of the Contextual Robotics Institute here at UC San Diego.
The following research will be presented at ICRA:
Robust Surgical Tool Tracking with Pixel-based Probabilities for Projected Geometric Primitives
A paper on improving tools for robot-assisted surgery would not have been possible without sharing the same building with electrical engineers, said Christopher D’Ambrosia, who earned his PhD in Christensen’s research group.
D’Ambrosia worked closely with the research group of Michael Yip, a professor in the UC San Diego Department of Electrical and Computer Engineering. Coauthors from Yip’s group on the paper were Florian Richter, Zih-Yun Ciu, Nikhil Shinde and Fei Liu.
Being in Franklin Antonio Hall allowed the researchers to hold spontaneous meetings, as well as scheduled group meetings and Q&A sessions. The PhD students could; share hardware, such as the DaVinci surgical robot platform; and work together at the various whiteboards available in the building.
“It 1000% would not have been possible to do this together without FAH,” D’Ambrosio said. “For example, one of us could easily pick up where someone else left off on a common workstation because we could easily shift our seats that day to the place where we were needed.
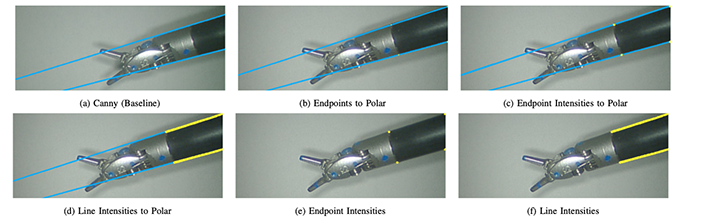
An example of how the tool tracking works
Robot Navigation in risky, crowded environments: understanding human preferences
Ph.D. students from the research groups of mechanical engineering professor Sonia Martinez and computer science professor Laurel Riek had been at work on a paper about how humans prefer to interact with robots in risky, crowded environments before their work shifted during the COVID 19 pandemic. Martinez and Riek both say the collaboration made them look forward to moving into Franklin Antonio Hall, which made it easier to work together.
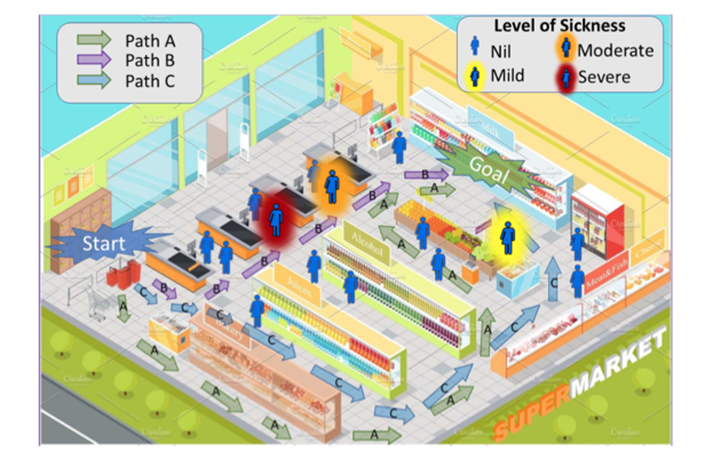
Researchers wanted to find out how risk tolerant people woudl be in their interactions with robots
Open X-Embodiment: Robotic Learning Datasets and RT-X Models (robotics-transformer-x.github.io)
Another collaboration stemming from being located in Franklin Antonio is the involvement of three UC San Diego engineering faculty members on a paper bringing together academic and industry researchers to develop a wide range of datasets for embodied AI and robotics. The three faculty members–Christensen, computer science professor Hao Su; and electrical and computer engineering Xiaolong Wang–used to be located in three different buildings. Moving into the same space at Franklin Antonio Hall allowed them to dramatically increase their collaborations, Christensen said.
Also of note, the lead author of the paper, Quan Vuong, is a former PhD student in Christensen’s research group here at UC San Diego.
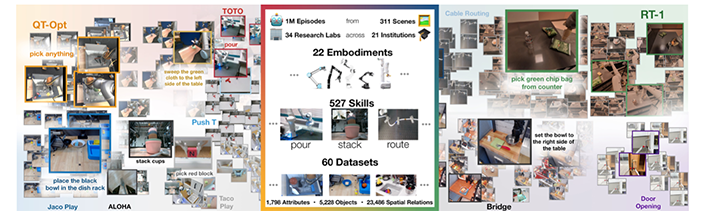
Researchers released a wide range of datasets for embodied AI and robots
In addition to these rich collaborations, Franklin Antonio Hall continues to be a center of innovative work in a wide range of robotics-related fields, as illustrated by these additional ICRA 2024 papers:
Nikolai Atanasov
Optimal Scene Graph Planning with Large Language Model Guidance:
Hamiltonian Dynamics Learning from Point Cloud Observations for Nonholonomic Mobile Robot Control website: https://altwaitan.github.io/DLFO/
Hao Su
EasyHeC (ootts.github.io)
Tania Morimoto
Hapstick: a soft flexible joystick for stiffness rendering via fiber jamming
Xiaolong Wang
Robot Synesthesia: In-hand Manipulation with Visuotactile Sensing
Sim2Real Manipulation on Unknown Objects with Tactile-based reinforcement learning
Michael Yip
Tracking Snake-like Robots in the Wild Using Only a Single Camera
Learn more about research and education at UC San Diego in: Artificial Intelligence,
Read more news about: Artificial Intelligence, Health Innovation
Share This:




Stay in the Know
Keep up with all the latest from UC San Diego. Subscribe to the newsletter today.